Code Learn OpenGL Chapter4
OpenGL第四章
深度测试
深度缓冲和颜色缓冲一样,每个片段都储存了对应的信息,通常是24位的。
当进行深度测试的时候,OpenGL会将一个片段的深度值和深度缓冲的内容(深度缓冲是一块内存区域,它包括了每个像素的深度值)对比,OpenGL会执行一个深度测试,如果这个测试通过了,深度缓冲会更新为新的深度值,反之则丢弃该片段。
深度测试位于片段着色器和模板测试后,在屏幕空间中运行的,所以和glViewport定义的视口息息相关,并且可以通过gl_FragCoord直接访问,其中(0,0)定义的是屏幕左下角,gl_FragCoord中包含的z分量则是片段的深度值。
目前的GPU都支持一个叫做提前深度测试的功能,它会在片段着色器前运行,如果确定一个片段永远不可见(对于当前帧),就提前丢弃。当然如果我们更改了片段的深度值,这个功能就不会运作了。
glEnable(GL_DEPTH_TEST);
//开启深度测试
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
//每帧调用,清除深度缓冲
glDepthMask(GL_FALSE);
//如果不希望更新深度缓冲,我们可以设定禁用深度缓冲的写入
glDepthFunc(GL_LESS);
//如果我们想更改深度缓冲的比较方法,可以参考下表来设定这个函数,当然,这个函数不能和上一个同时使用
| 函数 | 描述 |
|---|---|
| GL_ALWAYS | 永远通过深度测试 |
| GL_NEVER | 永远不通过深度测试 |
| GL_LESS | 在片段深度值小于缓冲的深度值时通过测试 |
| GL_EQUAL | 在片段深度值等于缓冲区的深度值时通过测试 |
| GL_LEQUAL | 在片段深度值小于等于缓冲区的深度值时通过测试 |
| GL_GREATER | 在片段深度值大于缓冲区的深度值时通过测试 |
| GL_NOTEQUAL | 在片段深度值不等于缓冲区的深度值时通过测试 |
| GL_GEQUAL | 在片段深度值大于等于缓冲区的深度值时通过测试 |
深度值精度
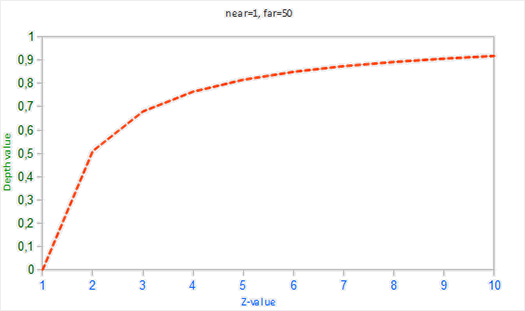
深度缓冲包含一个介于[0.0,1.0]之间的深度值,它会和观察者视角的所有片段的z值进行比较,将物体变换到这个范围的方法是:
$$
F_{depth}=\frac{1/z-1/near}{1/far-1/near}
$$
其中如果忘了far和near是什么,请查看坐标系统一章。为什么要用这么一个非线性的函数呢,由下图可以看出,这样一个方程可以在距离接近近平面的时候提供更大的精度。
深度冲突
深度冲突指的是当物体比较近的时候,可能会出现闪烁现象,这是因为精度不够计算它们的先后顺序,要解决这个问题有三种方法:
- 不要把多个物体放得太近。
- 将近平面设置的远一点。
- 使用更高的精度。
模板测试
在细说模板测试之前,我们需要了解关于测试的两个东西,一个是模板缓冲,一个是片段/像素的模板值。
模板缓冲里面按照规则存储了参考值,每个参考值都是8位长度,在测试中,对应位置的参考值会和片段的模板进行比较,按照规则选择留下或者丢弃,这些规则有:
GL_NEVER,GL_ALWAYSGL_LESS,GL_GREATERGL_LEQUAL,GL_GEQUALGL_EQUAL,GL_NOTEQUAL
举一个简单的例子:
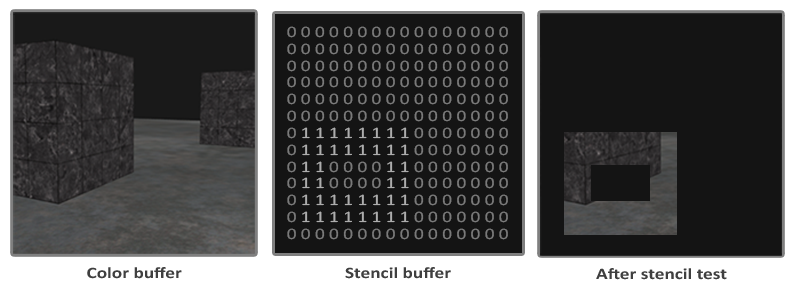
在这个例子中,模板测试应用的是等于的规则,当片段模板和模板缓冲都为1,才会被绘制。
模板测试的大致步骤为:
- 启用模板缓冲写入。
- 渲染物体,更新模板缓冲内容。
- 关闭模板缓冲的写入。
- 渲染其他物体,但根据模板缓冲丢弃特定片段。
和深度测试一样,模板测试也有以下函数用法:
glEnable(GL_STENCIL_TEST);
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT | GL_STENCIL_BUFFER_BIT);
//对应深度测试的glDepthMask(GL_FALSE),在模板测试中禁用模板缓冲的写入用的是:
glStencilMask(0x00);
//这样设置,输入的值会和0x00做AND运算,输出的结果就都是0x00,相反,如果要完整保留输入,则应该设置为0xFF,注意0x00会导致glClear不能正常清空
模板函数
说完了模板的设置,那如何具体应用模板呢,这就涉及到模板函数。从上文我们可以知道,“应用”模板包括两个部分:设置比较方法,设置比较完之后的动作。
我们通过glStencilFunc(GLenum func, GLint ref, GLuint mask)来设置模板测试通过的条件,通过glStencilOp(GLenum sfail, GLenum dpfail, GLenum dppass)来设置之后的行为。
glStencilFunc(GLenum func, GLint ref, GLuint mask);
//第一个参数表示如何比较,在上文我们提到过
//第二个参数设置了模板测试的参考值,它会被用来和模板缓冲比较
//第三个参数是一个掩码,在输入的参考值会和它做AND运算,然后再被存储
glStencilOp(GLenum sfail, GLenum dpfail, GLenum dppass);
//第一个参数表示模板测试失败时采取的行为
//第二个参数表示模板测试通过但深度测试失败时采取的行为
//第三个参数表示两者都通过的行为
| 行为 | 描述 |
|---|---|
| GL_KEEP | 保持当前储存的模板值 |
| GL_ZERO | 将模板值设置为0 |
| GL_REPLACE | 将模板值设置为glStencilFunc函数设置的ref值 |
| GL_INCR | 如果模板值小于最大值则将模板值加1 |
| GL_INCR_WRAP | 与GL_INCR一样,但如果模板值超过了最大值则归零 |
| GL_DECR | 如果模板值大于最小值则将模板值减1 |
| GL_DECR_WRAP | 与GL_DECR一样,但如果模板值小于0则将其设置为最大值 |
| GL_INVERT | 按位翻转当前的模板缓冲值 |
描绘物体轮廓
下面会给出一段代码,它实现了物体的描边功能:
int main() {
...
glEnable(GL_DEPTH_TEST);
glEnable(GL_STENCIL_TEST);
//开启模板测试
glStencilOp(GL_KEEP, GL_KEEP, GL_REPLACE);
glViewport(0, 0, WIDTH, HEIGHT);
Shader myShader("/home/herain/Documents/opengl/model/model.vertex", "/home/herain/Documents/opengl/model/model.fragment");
Shader singleShader("/home/herain/Documents/opengl/model/model.vertex", "/home/herain/Documents/opengl/model/singleColor.fragment");;
//加载一个只会上单色的片段着色器,用于描边
Model ourModel("/home/herain/Documents/opengl/model/obj/nanosuit.obj");
vec3 lightPos(1.2f, 1.0f, 2.0f);
while (!glfwWindowShouldClose(window)){
currentFrame = glfwGetTime();
deltaFrame = currentFrame - lastFrame;
lastFrame = currentFrame;
pos_update();
glClearColor(0.2f, 0.3f, 0.3f, 1.0f);
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT | GL_STENCIL_BUFFER_BIT);
glStencilFunc(GL_ALWAYS, 1, 0xFF);
glStencilMask(0xFF);
//绘制下面模型的时候,把这个模型所占区域的模板值改成1,可以看到这里始终通过模板测试,看向第9行,我们设置了当通过测试之后,缓冲里面对应区域会更改模板值的选项
myShader.use();
myShader.setVec3("viewPos", camera.Position);
myShader.setVec3("light.position", lightPos);
myShader.setVec3("light.ambient", vec3(0.2f));
myShader.setVec3("light.diffuse", vec3(0.5f));
myShader.setVec3("light.specular", vec3(1.0f));
myShader.setFloat("shininess", 32);
mat4 projection = perspective(radians(camera.Zoom), (float)WIDTH / (float)HEIGHT, 0.1f, 100.0f);
mat4 view = camera.GetViewMatrix();
myShader.setMat4("projection", projection);
myShader.setMat4("view", view);
mat4 model = mat4(1.0f);
model = translate(model, vec3(0.0, 0.0, 0.0));
model = scale(model, vec3(1.0f, 1.0f, 1.0f));
myShader.setMat4("model", model);
ourModel.Draw(myShader);
glStencilFunc(GL_NOTEQUAL, 1, 0xFF);
//上面一次绘制我们把在模型范围内的片段都设置了为1的模板值,其他的地方目前都是0,为了绘制边框的时候不会遮挡原本的模型,我们只在模板值为0的地方绘制边框
glStencilMask(0x00);
glDisable(GL_DEPTH_TEST);
//想象一下市面上应用模型描边的地方,基本都是在模型被其他物体遮挡的时候,所以如果开着深度测试,那么边框就会被遮挡而不会被绘制,所以此处为了穿墙效果,我们暂时把它关掉
singleShader.use();
mat4 model1 = mat4(1.0f);
model1 = translate(model, vec3(0.0, 0.0, 0.0));
model1 = scale(model, vec3(1.01f, 1.01f, 1.01f));
singleShader.setMat4("model", model1);
singleShader.setMat4("projection", projection);
singleShader.setMat4("view", view);
ourModel.Draw(singleShader);
//绘制一个体积大一点的模型,这个模型会全方面包裹真正用于显示的模型
glStencilFunc(GL_ALWAYS, 0, 0xFF);
glStencilMask(0xFF);
glEnable(GL_DEPTH_TEST);
//最后,为了下一次循环能够正常清空模板值,我们要把模板值设置回可以被更改,另外也要重新打开深度测试
glfwSwapBuffers(window);
glfwPollEvents();
}
glfwTerminate();
return 0;
}
最后,有的人可能发现,画出来的边框并没有包括住模型,而是朝某个方向偏移了,这是因为模型的中心点不在正中间。为了解决这个问题,我们可以把边框的顶点沿法线方向进行一个平移,即:
gl_Position = projection * view * model * vec4(aPos + aNormal * 0.1f, 1.0);
阴影映射
阴影,是物体遮挡光线后,后面的物体没接收到光的部分会暗于接收到光的部分,而呈现出的效果。以目前技术来说,阴影是消耗性能的大头,目前行业中有用到不同的阴影算法,他们都有自己的优劣,在使用时需要多加斟酌考虑。
游戏中使用较多的是阴影贴图技术,其效果和性能都不错,且容易拓展成更好的算法。
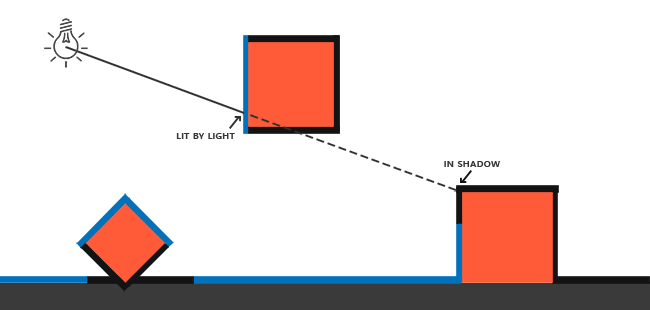
如图中所示,蓝线部分是光线可以到达的区域,黑线部分是被遮挡的区域。联想一下这个和摄像机的相通之处,摄像机中被遮挡的区域,在光线中则是渲染上阴影。
那么怎么判断光线先到达哪个物体呢?很简单,从光源方向发射一条射线,比较射线上碰撞到物体的各个点,选取最近的那一个点为光照投射点,其他则为阴影渲染点。
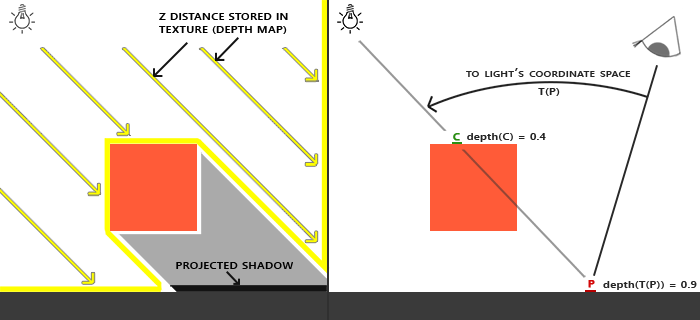
回想一下深度缓冲相关内容,深度缓冲中存储着从摄像机到片段的距离(归化到[0,1]范围),阴影贴图的原理也是如此:沿着光源方向向物体观察,记录物体在场景中的深度,并将它们存储在阴影贴图中。在使用阴影贴图的时候,我们会将该点的深度值和贴图中存储的深度值进行比较,取较近的一个,下图右图就演示了这个过程。
要注意在这个小节里我们暂时只讨论定向光源,也就是平行光。